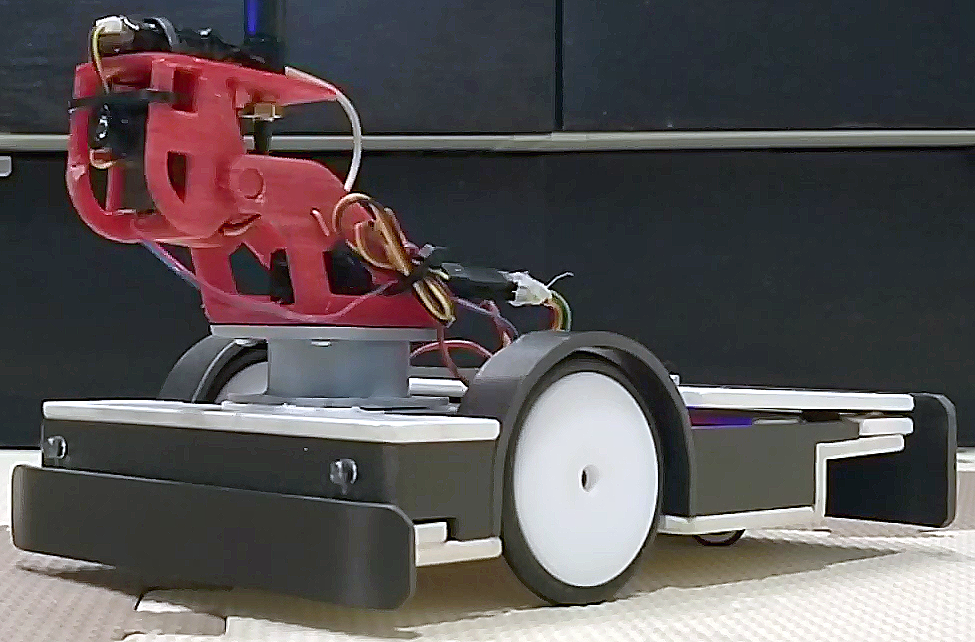
Main goals of the project:
- simple to make and cheap robot platform
- robot controlled easily from Internet through an Android app
- robot should be able to navigate between waypoints
- vision based positioning system
- time restrictions : one weekend
I always wanted to do something like this and finally I had a knowledge and time.
The goal is to make a robot to navigate from waypoint to waypoint based on some kind of positioning system.
For a long time I planned to use marker based tracking and a webcam so this is perfect opportunity to do it. I’ve chosen aruco markers. Why aruco markers? Because they are easy to detect and track using OpenCV, position has sub-pixel accuracy and calculate marker attitude is easy if needed.
Let’s start